
Code Design
The primary flow path for all operational modes of the STOMP simulator comprises three principal components: 1) initialization, 2) iteration, and 3) closure. A detailed flow diagram for these components is shown below.
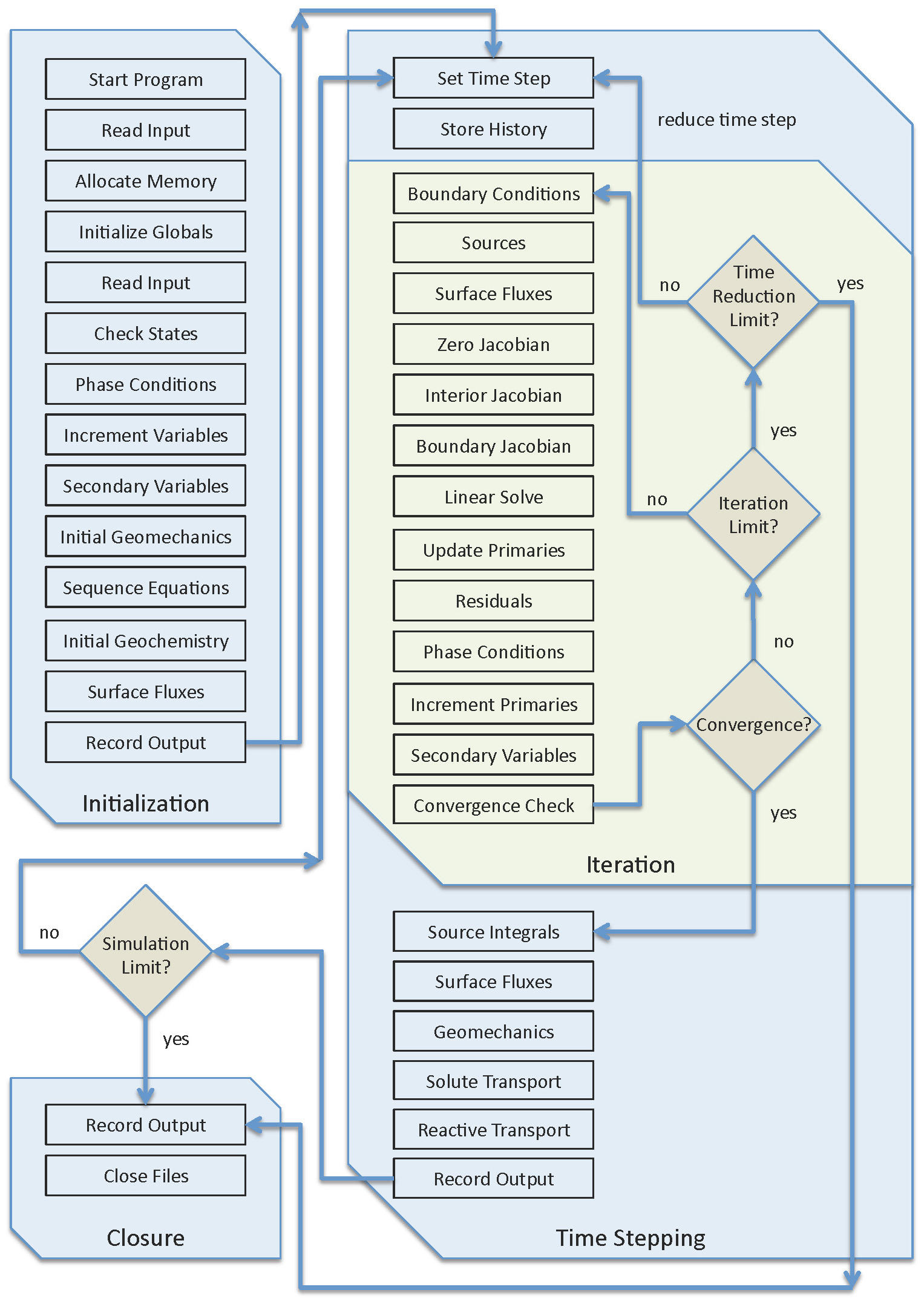
Figure 1. STOMP Flow Diagram
1) The initialization component of the program is executed once per simulation. The routines in the initialization component are executed sequentially, as shown in Figure 1, from the program start to the start of the first time step.
2) The iteration component of the program contains a pair of nested loops. The outer loop performs time stepping and the inner loop performs Newton-Raphson iteration.
- Termination of the Newton-Raphson loop occurs upon successful convergence or with an iteration limit violation.
- Termination of the time-stepping loop occurs due to the simulation limit or a time step reduction limit violation.
- It should be noted that "Solute Transport" is shown as a single routine on the STOMP flow diagram; however, it comprises several transport routines within a solute loop.
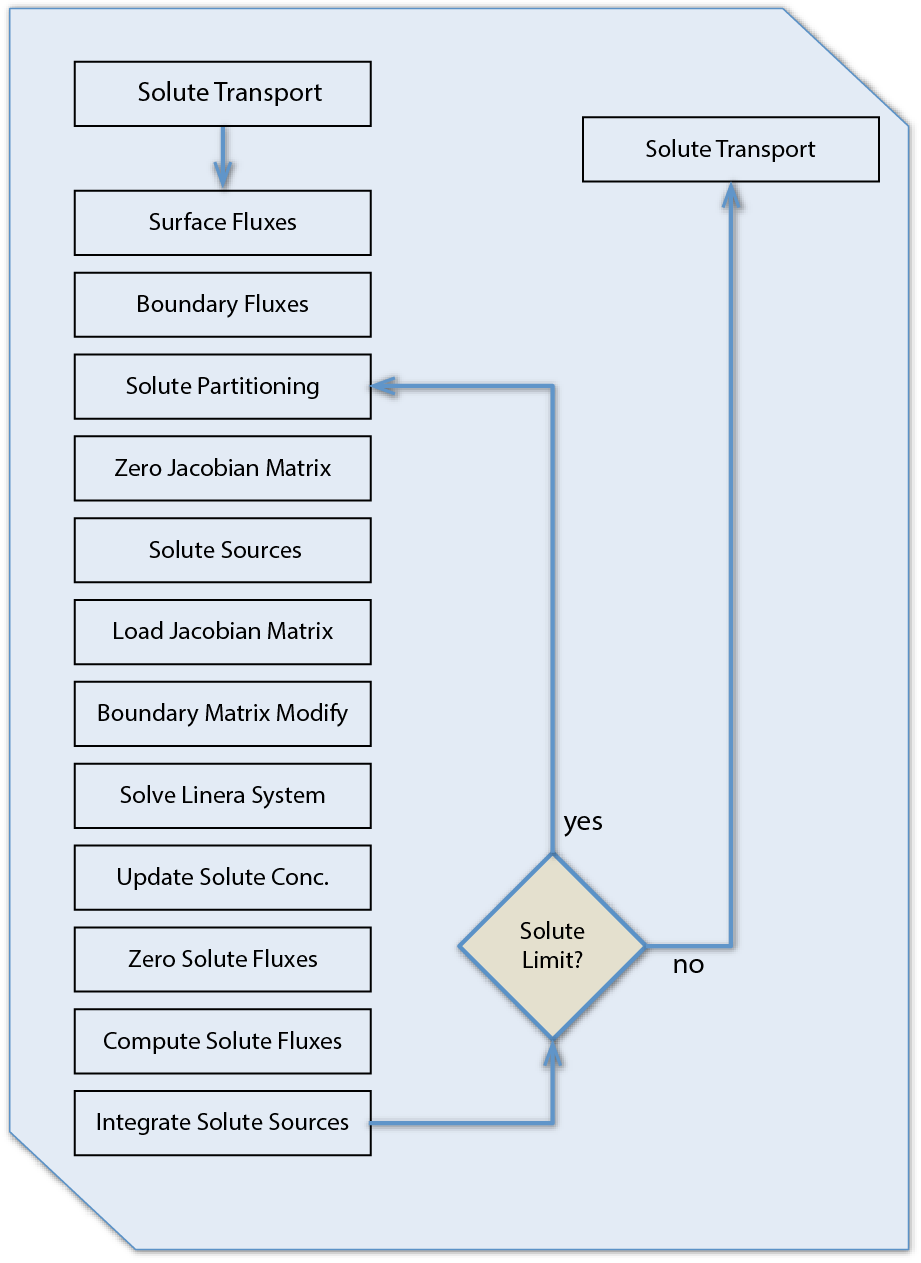 Figure 2. Transport Solution Flow Diagram
Figure 2. Transport Solution Flow Diagram
3) The closure routines are executed at the completion of a simulation (regardless of the termination cause).